FRC (FIRST Robotics Challenge) uses Ant to build the robot code. I think this is a wise choice since some teams are “internet challenged.” This hasn’t changed. What has changed since last year is that SmartDashboard uses Gradle to build. Our team is thinking about customizing Smart Dashboard this year which means we need to be able to build it.
Yesterday in the FRC lab, one of the StuyPulse team members asked me about Gradle. (I gave a really good overview of Ant last year so they remembered I knew build tools.) I explained the concepts of Maven/Gradle especially the local repository and dependencies. And I verbally explained how to run it. We didn’t get to do so together as there were other priorities for the day. And a lot of people weren’t at the meeting due to a competing school event. So I’m writing everything down in this post.
Building Smart Dashboard
The discussion was centered around building SmartDashboard. If you aren’t involved with a FIRST Robotics Competition team, this is a Java based UI used when running the robot. Conveniently that project comes with Gradle right in the project. So all you have to is:
- cd to directory you cloned SmartDashboard in
- chmod 700 gradlew
- ./gradlew build
Make sure you have internet before running this the first time. If you want to build directly from Eclipse, see my Eclipse Gradle post
Where is the output when building SmartDashboard
Running gradle creates a build directory. If you are using Eclipse, remember to hit refresh before looking for it. This build directory contains a number of things:
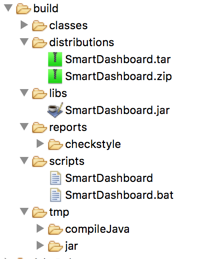
- distributions – a zipped up and tarred up version of SmartDashboard which includes the jar file, all need dependencies and the script to kick it off. This is what you need
- classes – the compiled .class files
- libs – a jar file with the compiled code in this project
- reports – how well did you follow the coding standards established for this project
- scripts – to launch SmartDashboard
- temp – would you really expect to find something important in a directory named temp?
What does the Gradle build file do?
Gradle is a build tool. The build.gradle file in SmartDashboard contains Groovy code that declares what the build should do. Both Gradle and Maven follow “convention over configuration” which means that a lot is implied! I went over most (but not all) of this out loud in the classroom.
A plugin is like a helper tool that Gradle is going to use in order to build. For example, ‘java’ is going to compile among other things. Most of these plugins are in common use. I hadn’t heard of the shadow before. A quick look tells me that it builds an uber jar (which is a distribution file that contains all the dependencies). That’s really useful. In fact, I have used the shade plugin which does the same thing in Maven. The WPILibVersioningPlugin is obviously specialized code for FIRST.
plugins {
id 'java'
id 'application'
id 'com.github.johnrengelman.shadow' version '1.2.4'
id 'maven-publish'
id 'idea'
id 'edu.wpi.first.wpilib.versioning.WPILibVersioningPlugin' version '1.6'
id 'checkstyle'
}
Gradle needs to download files in order to run. This includes the plugins that we just saw along with dependencies – jars that the program needs. These files are hosted in a repository for binary files. A really common one is Maven Central. This is used by both Maven and Gradle builds to obtain binaries.
repositories {
mavenCentral()
}
Those dependencies I just mentioned? Here they are. In this case, the dependencies are WPI code and common open source tools like JUnit (a testing library). Notice how all of these except the WPI one use the same format – three strings separated by colons? There’s a reason for this. When accessing Maven Central, you specify a GAV. This stands for group id/artifact id/version. The colons separate them. For example, jfree is a group id, jfreechart is an artifact id and 1.0.13 is a version.
Note that none of these four exhibits a “normal” GAV. You are supposed to use a fully qualified name for the group id. Just like we do for Java package names. An artifact id is lower case “words” separated by dashes if there is more than one word. Finally, you have an optional version number. There can also be some optional information like a classifier that tells you what file extension you need. The WPI example does have a good group id. And the others have good artifact ids and versions. For more on the WPILib group id see this post.
dependencies {
compile 'edu.wpi.first.wpilib.networktables.java:NetworkTables:+:desktop'
compile 'junit:junit:4.12'
compile 'jfree:jcommon:1.0.16'
compile 'jfree:jfreechart:1.0.13'
}
Next the script specifies that we should create a jar file and an uber jar file named SmartDashboard.
jar {
baseName = 'SmartDashboard'
}
shadowJar {
baseName = 'SmartDashboard'
}
Now you see that this really is a Groovy script; it even has an if statement.
// Ensure that the WPILibVersioningPlugin is setup by setting the release type, if releaseType wasn't
// already specified on the command line
if (!hasProperty('releaseType')) {
WPILibVersion {
releaseType = 'dev'
}
}
If the artifact is being published, details are here. WPI is publishing to this FIRST WPI Maven repo. They use the WPI Version Plugin and publish to the local Maven repo – which is the FIRST WPI Maven repo on their build server. (clarified in comment 65)
publishing {
publications {
maven(MavenPublication) {
artifact(shadowJar) {
classifier null
}
groupId 'edu.wpi.first.wpilib'
artifactId 'SmartDashboard'
version WPILibVersion.version
}
}
}
Getting close to the end. Now the build configuration says to use the coding conventions in the checkstyle.xml file. This is good. It means that people will have to follow coding conventions if they contribute back to SmartDashboard.
checkstyle {
configFile = new File(rootDir, "checkstyle.xml")
toolVersion = '6.19'
if (project.hasProperty("ignoreCheckstyle")) {
ignoreFailures = true
}
}
In Java, you can automatically configure a Jar to run a certain class’ main method when you run the jar. This is specified in the manifest. Gradle can generate this manifest for you.
mainClassName = "edu.wpi.first.smartdashboard.SmartDashboard"
SmartDashboard comes with a fakeRobot test project. This is a submodule from Gradle’s point of view so it needs a build config too. Luckily you already know what plugins, dependencies and a main class are so this should be clear.
project(':fakeRobot') {
apply plugin: 'java'
apply plugin: 'application'
dependencies {
compile 'edu.wpi.first.wpilib.networktables.java:NetworkTables:+:desktop'
}
mainClassName = "edu.wpi.livewindowfakerobot.LiveWindowFakeRobot"
}
The end! The very last thing is to declare which version of Gradle this entire script should be run with.
task wrapper(type: Wrapper) {
gradleVersion = '3.3'
}
-
Output from building in gradle
I’m including the output from a “good” run in case you have problems and want to compare. This is for the first time you run it. After that the download steps won’t be in the output and it will run much faster.
$ ./gradlew build
Downloading https://services.gradle.org/distributions/gradle-3.3-bin.zip
..................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
Unzipping /Users/jeanne/.gradle/wrapper/dists/gradle-3.3-bin/64bhckfm0iuu9gap9hg3r7ev2/gradle-3.3-bin.zip to /Users/jeanne/.gradle/wrapper/dists/gradle-3.3-bin/64bhckfm0iuu9gap9hg3r7ev2
Set executable permissions for: /Users/jeanne/.gradle/wrapper/dists/gradle-3.3-bin/64bhckfm0iuu9gap9hg3r7ev2/gradle-3.3/bin/gradle
Starting a Gradle Daemon (subsequent builds will be faster)
Download https://plugins.gradle.org/m2/com/github/jengelman/gradle/plugins/shadow/1.2.4/shadow-1.2.4.pom
Download https://plugins.gradle.org/m2/gradle/plugin/edu/wpi/first/wpilib/versioning/wpilib-version-plugin/1.6/wpilib-version-plugin-1.6.pom
Download https://plugins.gradle.org/m2/org/ow2/asm/asm-commons/5.0.3/asm-commons-5.0.3.pom
Download https://plugins.gradle.org/m2/org/apache/ant/ant/1.9.4/ant-1.9.4.pom
Download https://plugins.gradle.org/m2/org/apache/ant/ant-parent/1.9.4/ant-parent-1.9.4.pom
Download https://plugins.gradle.org/m2/org/codehaus/groovy/groovy-backports-compat23/2.4.4/groovy-backports-compat23-2.4.4.pom
Download https://plugins.gradle.org/m2/org/ajoberstar/grgit/1.7.0/grgit-1.7.0.pom
Download https://plugins.gradle.org/m2/org/apache/ant/ant-launcher/1.9.4/ant-launcher-1.9.4.pom
Download https://plugins.gradle.org/m2/org/eclipse/jgit/org.eclipse.jgit/4.3.1.201605051710-r/org.eclipse.jgit-4.3.1.201605051710-r.pom
Download https://plugins.gradle.org/m2/org/eclipse/jgit/org.eclipse.jgit-parent/4.3.1.201605051710-r/org.eclipse.jgit-parent-4.3.1.201605051710-r.pom
Download https://plugins.gradle.org/m2/org/eclipse/jgit/org.eclipse.jgit.ui/4.3.1.201605051710-r/org.eclipse.jgit.ui-4.3.1.201605051710-r.pom
Download https://plugins.gradle.org/m2/com/jcraft/jsch.agentproxy.jsch/0.0.9/jsch.agentproxy.jsch-0.0.9.pom
Download https://plugins.gradle.org/m2/com/jcraft/jsch.agentproxy/0.0.9/jsch.agentproxy-0.0.9.pom
Download https://plugins.gradle.org/m2/com/jcraft/jsch.agentproxy.pageant/0.0.9/jsch.agentproxy.pageant-0.0.9.pom
Download https://plugins.gradle.org/m2/com/jcraft/jsch.agentproxy.sshagent/0.0.9/jsch.agentproxy.sshagent-0.0.9.pom
Download https://plugins.gradle.org/m2/com/jcraft/jsch.agentproxy.usocket-jna/0.0.9/jsch.agentproxy.usocket-jna-0.0.9.pom
Download https://plugins.gradle.org/m2/com/jcraft/jsch.agentproxy.usocket-nc/0.0.9/jsch.agentproxy.usocket-nc-0.0.9.pom
Download https://plugins.gradle.org/m2/org/slf4j/slf4j-api/1.7.21/slf4j-api-1.7.21.pom
Download https://plugins.gradle.org/m2/org/slf4j/slf4j-parent/1.7.21/slf4j-parent-1.7.21.pom
Download https://plugins.gradle.org/m2/com/jcraft/jsch/0.1.53/jsch-0.1.53.pom
Download https://plugins.gradle.org/m2/com/googlecode/javaewah/JavaEWAH/0.7.9/JavaEWAH-0.7.9.pom
Download https://plugins.gradle.org/m2/org/sonatype/oss/oss-parent/5/oss-parent-5.pom
Download https://plugins.gradle.org/m2/com/jcraft/jsch.agentproxy.core/0.0.9/jsch.agentproxy.core-0.0.9.pom
Download https://plugins.gradle.org/m2/com/github/jengelman/gradle/plugins/shadow/1.2.4/shadow-1.2.4.jar
Download https://plugins.gradle.org/m2/gradle/plugin/edu/wpi/first/wpilib/versioning/wpilib-version-plugin/1.6/wpilib-version-plugin-1.6.jar
Download https://plugins.gradle.org/m2/org/ow2/asm/asm-commons/5.0.3/asm-commons-5.0.3.jar
Download https://plugins.gradle.org/m2/org/apache/ant/ant/1.9.4/ant-1.9.4.jar
Download https://plugins.gradle.org/m2/org/codehaus/groovy/groovy-backports-compat23/2.4.4/groovy-backports-compat23-2.4.4.jar
Download https://plugins.gradle.org/m2/org/ajoberstar/grgit/1.7.0/grgit-1.7.0.jar
Download https://plugins.gradle.org/m2/org/apache/ant/ant-launcher/1.9.4/ant-launcher-1.9.4.jar
Download https://plugins.gradle.org/m2/org/eclipse/jgit/org.eclipse.jgit/4.3.1.201605051710-r/org.eclipse.jgit-4.3.1.201605051710-r.jar
Download https://plugins.gradle.org/m2/org/eclipse/jgit/org.eclipse.jgit.ui/4.3.1.201605051710-r/org.eclipse.jgit.ui-4.3.1.201605051710-r.jar
Download https://plugins.gradle.org/m2/com/jcraft/jsch.agentproxy.jsch/0.0.9/jsch.agentproxy.jsch-0.0.9.jar
Download https://plugins.gradle.org/m2/com/jcraft/jsch.agentproxy.pageant/0.0.9/jsch.agentproxy.pageant-0.0.9.jar
Download https://plugins.gradle.org/m2/com/jcraft/jsch.agentproxy.sshagent/0.0.9/jsch.agentproxy.sshagent-0.0.9.jar
Download https://plugins.gradle.org/m2/com/jcraft/jsch.agentproxy.usocket-jna/0.0.9/jsch.agentproxy.usocket-jna-0.0.9.jar
Download https://plugins.gradle.org/m2/com/jcraft/jsch.agentproxy.usocket-nc/0.0.9/jsch.agentproxy.usocket-nc-0.0.9.jar
Download https://plugins.gradle.org/m2/org/slf4j/slf4j-api/1.7.21/slf4j-api-1.7.21.jar
Download https://plugins.gradle.org/m2/com/jcraft/jsch/0.1.53/jsch-0.1.53.jar
Download https://plugins.gradle.org/m2/com/googlecode/javaewah/JavaEWAH/0.7.9/JavaEWAH-0.7.9.jar
Download https://plugins.gradle.org/m2/com/jcraft/jsch.agentproxy.core/0.0.9/jsch.agentproxy.core-0.0.9.jar
No .git was found in /Users/jeanne/Documents/workspace/SmartDashboard, or any parent directories of that directory.
No version number generated.
:compileJava
Download http://first.wpi.edu/FRC/roborio/maven/development/edu/wpi/first/wpilib/networktables/java/NetworkTables/3.1.5-20170105171843-1-g3e2631f/NetworkTables-3.1.5-20170105171843-1-g3e2631f.pom
Download https://repo1.maven.org/maven2/jfree/jcommon/1.0.16/jcommon-1.0.16.pom
Download https://repo1.maven.org/maven2/jfree/jfreechart/1.0.13/jfreechart-1.0.13.pom
Download http://first.wpi.edu/FRC/roborio/maven/development/edu/wpi/first/wpilib/networktables/java/NetworkTables/3.1.5-20170105171843-1-g3e2631f/NetworkTables-3.1.5-20170105171843-1-g3e2631f-desktop.jar
Download https://repo1.maven.org/maven2/jfree/jcommon/1.0.16/jcommon-1.0.16.jar
Download https://repo1.maven.org/maven2/jfree/jfreechart/1.0.13/jfreechart-1.0.13.jar
Note: Some input files use or override a deprecated API.
Note: Recompile with -Xlint:deprecation for details.
Note: Some input files use unchecked or unsafe operations.
Note: Recompile with -Xlint:unchecked for details.
:processResources UP-TO-DATE
:classes
:jar
:startScripts
:distTar
:distZip
:assemble
:checkstyleMain
Download https://repo1.maven.org/maven2/com/puppycrawl/tools/checkstyle/6.19/checkstyle-6.19.pom
Download https://repo1.maven.org/maven2/org/antlr/antlr4-runtime/4.5.3/antlr4-runtime-4.5.3.pom
Download https://repo1.maven.org/maven2/org/antlr/antlr4-master/4.5.3/antlr4-master-4.5.3.pom
Download https://repo1.maven.org/maven2/commons-cli/commons-cli/1.3.1/commons-cli-1.3.1.pom
Download https://repo1.maven.org/maven2/com/puppycrawl/tools/checkstyle/6.19/checkstyle-6.19.jar
Download https://repo1.maven.org/maven2/org/antlr/antlr4-runtime/4.5.3/antlr4-runtime-4.5.3.jar
Download https://repo1.maven.org/maven2/commons-cli/commons-cli/1.3.1/commons-cli-1.3.1.jar
:compileTestJava UP-TO-DATE
:processTestResources UP-TO-DATE
:testClasses UP-TO-DATE
:checkstyleTest UP-TO-DATE
:test UP-TO-DATE
:check
:build
:fakeRobot:compileJava
:fakeRobot:processResources UP-TO-DATE
:fakeRobot:classes
:fakeRobot:jar
:fakeRobot:startScripts
:fakeRobot:distTar
:fakeRobot:distZip
:fakeRobot:assemble
:fakeRobot:compileTestJava UP-TO-DATE
:fakeRobot:processTestResources UP-TO-DATE
:fakeRobot:testClasses UP-TO-DATE
:fakeRobot:test UP-TO-DATE
:fakeRobot:check UP-TO-DATE
:fakeRobot:build
BUILD SUCCESSFUL
Total time: 1 mins 9.099 secs





{kind=link}